


動手動腦 Learning by Doing
“我們不畏懼失敗,透過技術(理論)與實驗(實作)的交叉驗證來創造出更具藝術文化的作品,將來能作為科技界的創新領導人才”
人工智慧活用精進範例
波士頓動力機械狗Spot
前麻省理工學院教授Marc Raibert創立波士頓動力,宗旨在製造近似人類和動物的先進自動機器人。
波士頓動力(Boston Dynamics)歷經 15 年的研發與改良後,於2019 年正式以亮黃色塗裝的四足機器人又稱「Spot」 進入量產。Spot 高 84 公分、重 32.5 公斤,動作敏捷、用途多元且設計線條俐落、步伐輕快穩健且動作流暢,具備良好的協調性與彈性,不管是行走於平滑或崎嶇路面、跑跳、攀爬斜坡或樓梯都相當靈活敏捷,能適應複雜的地形行走自如,靈巧穿梭於狹小複雜的空間。Spot 機身搭載光達、紅外線與立體視覺感測器,能即時繪製 3D 點雲地圖並在行走時偵測與閃躲障礙物。Spot 已被運用於退役核電站、發電廠,工廠、建築工地、以及在海上鑽油平台等。Spot可廣泛運用於巡邏,故障排查、洩漏偵測,並可於不同的天氣與環境下能執行任務,得以協助作業人員執行困難或危險的任務,降低場域環境和任務的安全風險。
臺北科技大學城市科學實驗室共有三台Spot,其中一台放美國波士頓MIT 實驗室,執行兩校兩地實驗室聯合異地同步教學,活用軟體運用,互相學習與精進。Spot 具有光達模組,相機模組與機械手臂。透過ROS 2 教學的整合,未來實驗室將提供機械狗的活用與教學。除了機器學習,影像判斷的研究外,亦將透過做中學,學中做的方式來了解Spot 的高性能機械設計方法與機電整合的策略。可將臺灣學生的人工智慧教學,迅速提升至世界第一級實驗室的專業教學。吸引更多亞洲區優秀學生到臺灣接受國際一級的科技教育,建立臺灣在世界的重要地位。。


2014 起源於MIT的Cheetah 機械獵豹

2022 不斷精進的SPOT 機器狗(波士動動力公司)
教學軟體 ROS 說明
ROS 全名為Robot Operating System,為一套開源的機器人軟體系統框架,旨在縮短機器人的軟體開發,透過統一的框架,開發者們可以共享開發成果,站在巨人的肩膀上,避免重複造輪,進而加速科技發展,目前由開源基金會 Open Source RoboticsFoundation(OSRF) 維護,擁有廣大的開發社群,受世界各地的創客、開發者、公司與研究機構的支持與廣泛應用,由MIT 校友成立的Boston Dynamics,其SPOT 機器狗亦使用ROS 進行開發;Willow Garage 這個組織以開發出PR2 和TurtleBot 2 等機器人而聞名,2008 年時,ROS 正式進入 2.0 的時代,支援Linux 、Windows 與macOS 系統,ROS 將開發語言獨立,並可運用如C++、python 等多種開發語言進行整合。除官方提供機器人導航(Navigation)、定位(Localization)、路徑規劃(Path-planning) 與即時定位與地圖建構演算法 (Simultaneous localization and mapping) 等基礎開發資源外,ROS 另可擴展使用各式開源資源如Google 的開源SLAM庫(Cartographer),豐沛的開源資源也和ROS 共同組構強大機器人整合開發生態系。每年基金會皆會舉辦ROScon 聚集世界各地的愛好者、開發者、公司與研究機構一起共襄盛舉。

實驗室設備
研發與教學並進,與MIT與國際城市科學實驗室聯盟連結。動手動腦實驗室的研發與教學以ROS 2軟體為主。實驗室配備Turtle Bot 3 作為基礎機器人教具,並提供Boston Dynamics 機器狗,MIT Persuasive Electric Vehicle 無人車,Universal Robotics UR5 機械手臂等高階智慧機器作為複雜機電與人工智慧軟體的整合與運用的研發。實驗室空間為 "活"的實驗室,具有獨立網路與資安設備,並與麻省理工學院緊密合作,提供學生與研究員動手動腦,互相交流與學習。

混合信號示波器
Keysight MSO3024T Mixed-signal oscilloscope
示波器是將電信號視覺化相當基礎且重要的儀器。我們特別挑選了MSO3024T,除了4 個傳統的類比通道以外,還包含了16 個數位通道、各式各樣的通訊解碼功能,合乎一切科技與藝術創作所需的功能,使我們豐富的想像力得以實現。

七位半數位電表
Keysight 34470A 7 ½ Digital Multimeter
你能否想像誤差只有0.0016% 是如何辦到的? 34470A 簡直就是一件藝術品,多麼令人尊敬。實驗室擁有一部量測範圍寬廣、高解析度的數位電表,除了電子實驗與驗證以外,理化實驗也少
不了它!

可程式線性直流電源供應
Keithley 2230G-30-6 Programable DC Power Supply
再完美的電路,也少不了一台低雜訊的電源供應器,2230G-30-6 在串並聯模式下最大可輸出60V 6A 或30V 12A,符合絕大多數的電路實驗;內建高解析度電壓與電流表,能讓我們即時了解電路的工作狀態。

一千五百瓦電子負載機
B&K Precision 8510B 1500-watt electronic load
電子負載機在電力電子的領域下是個重要的儀器,有別於一般的電阻負載,電子負載機可以持續以定電壓、定電流或定功率模式下拉載,對於測試各式電源轉換器和電池是像當有幫助的儀器。
臺北科技大學城市科學實驗室校友義務支援研發教學及精密製作高階量測機器儀器範例說明

色彩實驗室Colibri色彩控制軟體
Powerful Color Matching Software Colibri ®
Colibri® 是模組化的色彩控制軟體,提供使用者完整全面的色彩管理解決方案,可讓不同的使用者得以在同樣的色彩標準下溝通,同時對於色彩標準的定義及數據保有嚴謹的控制權及所有權

色差儀
JAPAN KONICA MINOLTA CM-3700A Spectrophotometer
CM-3700A 色差儀可以快速, 精準量測樣品在不同光源下的色差L, a, b 值, 並利用軟體計算出色差dE 值。

紫外/可見光分光光譜儀
USA Varian Cary 300 UV/Vis Spectrophotometer
CARY 300 紫外/ 可見光分光光譜儀能偵測樣品
在不同波長下之穿透及反射率。
光密度量測儀
USA X-Rite 361T Transmission Densitometer
X-Rite 361T 光密度儀可精準量測薄膜樣品光密度OD 值, OD 越大, 透過樣品的光就越少。
穿透式電子顯微鏡
JAPAN JEOL TRANSSION ELECTRON MICROSCOPE JEM-2100PLUS
精細聚焦的電子束掃描樣品,可以分析檢視樣品
表面狀況,並可進行元素樣品分析。

高精度3D掃描光學測量儀
GERMANY GOM ADVANCED TOPOMETRIC SENSOR CAPSULE 12M
運用精密雷射3D 掃描工件,可以得到工件結構及工件尺寸,後續可以進行逆向工程。

飛秒雷射五軸紋理加工機
SWISS GF LASER P400 5-AXIS MACHINE
運用飛秒雷射進行工件或模具加工,可雕刻表面微結構或紋理,實現微加工工件精密零件美學和功能紋理的設計。

雙柱型萬能材料試驗機
USA INSTRON DUAL COLUMN UNIVERSAL TESTING SYSTEMS 5967 Model with Automatic Contacting Extensometer AutoX750
可以拉伸或壓縮物體或測試片,進行材料特性分析量測。

電腦斷層掃描
Zeiss Metrotom 800 X-ray
非破壞式穿透檢視物體內部結構,並可進行尺寸量測。

高性能斷層掃瞄檢測系統
GERMANY WAYGATE NANOMEIX NEO
•非破壞式穿透檢視物體內部結構,可了解物體內
部零件的狀況,及進行問題分析。

3D雷射掃描
3D scanning laser microscope Keyence VK-X200
•精密雷射掃描物體表面,可以量測物體表面形狀及表面粗糙度。
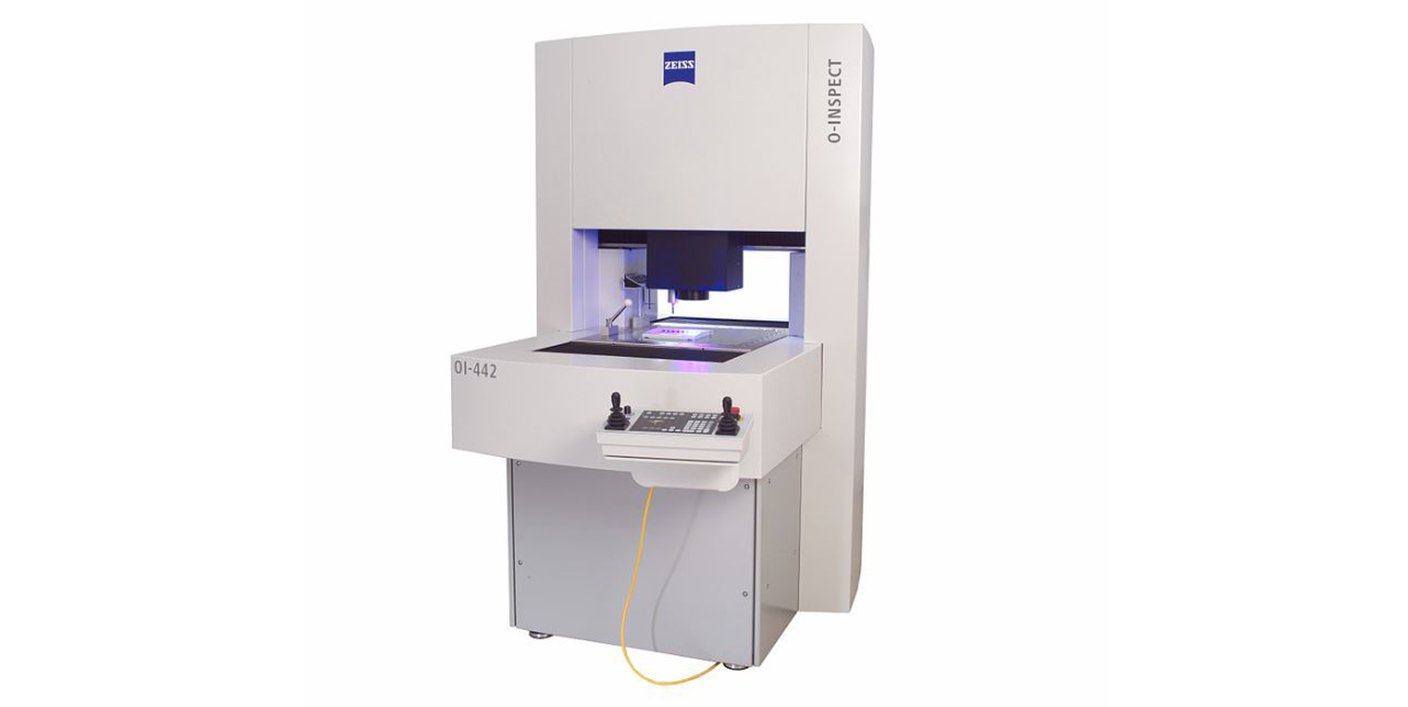
高精度接觸式及光學式量測系統
Germany ZEISS O-INSPECT
整合光學量測、接觸式量測及白光雷射量測系統,可以非常精確量測物品的尺寸。

高精度接觸式量測系統
USA Brown & Sharp Performance 575
探針接觸式量測物品,可以非常精確量測物品的尺寸。

高精度接觸式及光學式量測系統
USA Micro-Vu company EXCEL 662UM
整合光學量測、接觸式量測及白光雷射量測系統可以非常精確量測物品的尺寸。

高精度CNC加工機
Japan Roku-Roku Ultra-precision Micro-Fine
Milling machine CEGA SS400
• 高精密電腦數值控制加工機械,加工製作出來的
產品或模具非常的精準。

高精度放電加工機
SWISS +GF+ AGIECHARMILER FORM 30 EDM machine
高精密放電加工機械,加工製作出來的產品或模具非常的精準。

高精度CNC加工機
SWISS +GF+ MiKron MILL S 500
高精密電腦數值控制加工機械,加工製作出來的產品或模具非常的精準。

單噴頭多噴嘴塑料3D列印機
USA 3D SYSTEM 3D PRINTER PROJECT MJP 2500 PLUS
精密3D 列印模型及工件,可以選用不同材料,
達到各種設計要求。

高階工業製造級 3D 印表機
American-Israeli Stratasys Origin-One
一款革命性的 3D 列印機,使用各種高性能材料來大批量生產最終零件。採用 P3™可程式光聚合技術,通過現場分析,並同時結合自動壓力、拉力和溫度調節,確保生產第一個零件與最後一個零件完全相同的能力。